Hallo,
jetzt kommt auch mein Quadrocopter Baubericht. Die ersten Pläne hatte ich im Jahre 2012. Da habe ich mir dann aber auf den Rat aus einem Forum einen Blade mQx gekauft um erstmal in die Materie reinzukommen. Mit diesem bin ich dann auch bis jetzt geflogen, aber jetzt wurde sein Zustand immer schlechter. Verbindung mit der Fernbedienung etc.
Das war der Auslöser eines neuerlichen Wunsches nach einem Selbstbau.
Und dann habe ich begonnen zu recherchieren und diese Komponenten kamen dabei raus:
Quadrocopter:
Motoren: T-Motor AIR2213 920 kv
Regler: T-Motor AIR20A
Propeller: T-Motor T9545
Alles aus dem T-Motor AIR GEAR 350 Set
FC: Pixhawk Lite von Ebay
GPS: Crius NEO-6m V3.1
Akku: Multistar High Capacity 4S 4000mAh
Rahmen: Eigenbau Alu Rahmen
Das war es auch schon von Komponentenseite.
Ich habe eventuell einen Fehler bei der Akkuauslegung gemacht. Denn ich habe für die Berechnung dummerweise nur den Strom von einem Motor genommen und darauf den Lipo abgestimmt.
Allerdings wird nur bei Vollgas, laut T-Motor Daten, der Dauerstrom des Lipos überschritten. Sollte also, denke ich, für nicht allzu sportlichen Flug funktionieren.
So jetzt geht es aber los mit dem Baubericht:
Ich habe mir zwei Meter Alu Vierkantrohr bestellt, da die örtlichen Baumärkte nichts passendes hatten. Dazu habe ich mir 4mm Multiplex Holz gekauft. Dieses wird für die Centerplatten verwendet.

Zuerst habe ich das Alu auf die nötige Länge gekürzt. Es sollte ursprünglich ein 450er Quadrocopter werden, da ich aber beim Sägen geistig abwesend war und 250mm statt 225mm lange Arme herausgeschnitten habe, wird
es jetzt ein 500er.


Das Ergebnis:

Dann habe ich das Multiplex Holz auf die richtige Größe gesägt.

Als das gemacht war, habe ich die Löcher für die Armbefestigung angezeichnet. Das habe ich so gemacht, dass ich zuerst die Ecken verbunden habe und danach mit einem Zirkel von der Mitte aus die Löcher angezeichnet habe.



Die entstandenen Punkte habe ich gekörnt, damit die Löcher genauer werden.

Verwendet habe ich 8 Löcher mit jeweils 4mm Durchmesser für eine M4 Schraube und eine Stoppmutter auf der anderen Seite.
Zum Bohren habe ich die beiden Platten mit einer Zwinge zusammen gehalten, damit die Löcher an der gleichen Stelle sind. Dabei nicht vergessen sich zu markieren welche Seiten des Holzes beim Bohren übereinander lagen.

Für die Befestigungslöcher in den Alu-Armen habe ich zunächst die mittleren Löcher ausgemessen und gebohrt. Die Alu-Arme wurden durch diese Löcher in der Mitte fixiert, weswegen ich die äußeren Löcher nicht ausmessen musste, sondern mit einem Winkel für Rechtwinkligkeit sorgen und dann mit dem 4mm Bohrer „anbohren“ konnte. Das Durchbohren habe ich mit der Standbohrmaschine gemacht.

Damit war das Grundgerüst des Rahmens fertig.

Wenn man genau arbeitet hat man zwei exakt gleiche Platten. Bei mir waren sie auf unter einem mm genau. Das ist allerdings nicht sooo wichtig, soweit die Löcher an den selben Positionen sind.
Update 9.12.15:
Ich habe die obere Centerplatte vergrößert, sodass das GPS jetzt ganz vorne sitzt und hoffentlich etwas weniger Störungen abbekommt. Dazu kann ich durch die verlängerte Centerplatte die Kamera so montieren, dass ich keine Propeller im Bild habe. Sie ist jetzt von unten an die Centerplatte geschraubt.
Anhang anzeigen 143240
Anhang anzeigen 143239
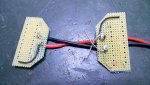
Da ich mir kein Stromverteilungsboard gekauft habe, musste ich mir eines selber bauen.
Dazu habe ich eine Lochraster Platine genommen und aus ihr zwei Stücke herausgebrochen, die in den Zwischenraum zwischen meinen beiden Centerplatten passen.


Als nächstes habe ich mir aufgezeichnet wie ich den Kupferdraht, der den Strom leitet, verlegen will.



An den Enden habe ich zwei Kabel angelötet.

Dieses habe ich doppelt ausgeführt und habe beide miteinander verbunden. Auf Polarität achten!!!
Die beiden rechten Kabel führen zum Akku hin.

So sieht dann das Stromverteilungsboard verbaut aus. Die Kabel die unten aus dem Bild gehen, gehen zum zweiten Board mit Batterieanschluss. Links oben habe ich testweise schon mal einen Regler angelötet.

Update 9.12.15:
Auf dem Bild sieht mein selbstgebautes APM Power Module, das den Strom und die Spannung misst und 5V für den Pixhawk zur Verfügung stellt. Dieses wurde direkt unter den Akku verbaut und mithilfe eines Flachbandkabels mit dem Pixhawk verbunden.
Anhang anzeigen 143235
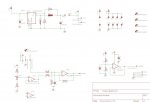
So ist die Verschaltung. Ich kann die genaue Funktionsweise genauer erklären, wenn erwünscht.
Anhang anzeigen 143255
Das war der Testaufbau
Anhang anzeigen 143236
Anhang anzeigen 143234
Anhang anzeigen 143233
Jetzt fehlten mir noch die Motorhalter, ein Akkuhalter und ein Landegestell.
Aber die Motorhalter zuerst.
Ich habe mir ein Design überlegt und dieses in Visio gezeichnet, ausgedruckt und dann auf ein Stück Holz übertragen.
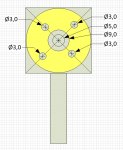
Wieder mit dem Körner die Ecken gekennzeichnet und dann gefräst.
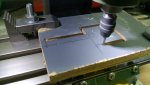
Die Löcher noch gebohrt und eventuell erweitert falls es nicht gepasst hat.
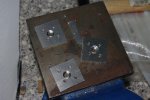
Das Ergebnis:



Dies Motorhalter mussten ja noch am Rahmen befestigt werden. Deswegen habe ich in die Aluminium Arme und in die Motorhalter 2,5mm Löcher gebohrt, um dann in das Holz ein M3 Gewinde zu schneiden. Die Löcher in den Aluminium Armen habe ich dann noch aufgebohrt auf 3mm, damit meine Schrauben durchpassen.

Zum Gewindeschneiden habe ich leider keine Bilder.
Nachtrag 28.9.15 zu den Motorhaltern:
Es hat sich herausgestellt, das das Holz nicht gescheit hält, deswegen habe ich aus 7075er Aluminium neue gebaut:
Zuerst habe ich mir wieder die grobe Menge Alu abgeschnitten(Meine Fräse ist zu klein).


Dann gefräst


Danach noch die diversen Löcher gebohrt und solange nachbearbeitet, bis der Sicherungsring nicht mehr geschliffen hat.
Das Ergebnis:

Montiert sieht das Ganze dann so aus:




Ich habe gestern Abend auch noch einen kurzen Testflug gemacht. Fliegt sich minimal agiler habe ich das Gefühl.
Die Reglerbefestigung: Diese Regler lassen sich leider nur sehr schlecht mit Kabelbindern so montieren, dass ihre Kühlfläche frei ist. Andersherum hängt die Kühlfläche leider wenige Millimeter in der Luft. Deswegen habe ich aus Aluminium kleine Wärmeleitpads gefräst. Diese sollen dazu dienen die Abwärme der Regler an die Alu Arme weiterzugeben. Zwischen Alu und Alu habe ich noch etwas Wärmeleitpaste geschmiert.




Der Rahmen mit Motoren wiegt 650 Gramm.

Danach gibt es leider kein Bildmaterial während des Baus sondern nur fertige Aufnahmen, da meine Kamera ausgefallen ist.
Zur Akkuhalterung wurde eine ehemalige Schraubenkiste zweckentfremdet und der Deckel mithilfe der Schrauben, die meine Centerplatten zusammenhalten am Quadrocopter montiert. Den Rest der Box habe ich mithilfe von zwei Kabelbindern, die unter dem Deckel verlegt sind, befestigt. Somit ist der Akku schon mal in drei Richtungen gesichert. Zur Sicherung der vierten Richtung nutze ich einen Gummi der an zwei kleinen Schrauben eingehakt wird.


Zusätzlich habe ich noch LEDs verbaut, um die Sichtbarkeit des Kopters zu verbessern. Vorher war es schon nach wenigen Metern Entfernung für mich quasi unmöglich zu erkennen wie der Kopter steht. Es sind diehier: eBay inspiriert aus diesem Thread: Fpv-Community
Anhang anzeigen 143251
Anhang anzeigen 143237
Am Ende habe ich mir noch versucht mit meiner Tiefziehbox eine Haube für den Kopter zu bauen, um die Elektronik besser vor Wasser zu schützen. Erstmal musste ein Negativ her. Ich habe mir einfach was aus Legos gebaut.
Anhang anzeigen 143238
Und dann tiefgezogen. Leider habe ich sehr viele Falten in dem Lexan.
Anhang anzeigen 143254
Anhang anzeigen 143253
Das Landegestell war das letzte was noch fehlte. Man sieht ihm an das ich fliegen wollte und mich nicht noch lange damit rumschlagen wollte. Deswegen habe ich einfach von einem Elektroverlegerohr(nennt man das so?) Scheiben abgeschnitten. Da diese jedoch nicht genügend Abstand zwischen Copter und Boden brachten, habe ich einfach nochmal eine Scheibe abgeschnitten und die beiden mithilfe einer kleinen Schraube zusammengeschraubt.


Update 9.12.15:
Ich habe mein Landegestell überarbeitet und etwas aufwendigeres mit Stoßdämpfern gemacht. Inspiriert wurde ich von einem Bild im Internet. Es funktioniert einigermaßen gut. Die Stäbe sind aus einem alten CD-Regal, und leider nicht die leichtesten. Die Löcher in die Rohre habe ich mithilfe meiner Fräse "gebohrt", um nicht seitlich wegzurutschen.
Anhang anzeigen 143232
So sieht das Ganze dann am Copter montiert aus.
Anhang anzeigen 143241
Entschuldigung wegen der schlechten Bild Qualität.
Die Komponenten wurden mithilfe von doppelseitigem Klebeband bzw. Heißkleber auf die Holzplatte geklebt. Unter die FC habe ich noch etwas Schaumstoff angebracht zur Vibrationsdämpfung.


Dann ging es ans Einstellen der FC. Ich sag euch eine Odyssee. Denn auf meinem PC läuft nur der alte Mission Planner. Der Rest stürzt ab. Auf der Pixhawk Seite stand ich solle aber QgroundControl verwenden.
Also PC von meinem Vater geschnappt, installiert, ging wunderbar. Die Anleitung habe ich brav befolgt und wollte ein Firmware Update machen bricht ab mit der Meldung: “Erase Befehl nicht erkannt. Update complete.“ War's aber leider nicht.
Das Board hat sich nicht mehr gemeldet am PC.
Also gegoogelt. Herausgefunden das der Bootloader hinüber ist. Es gab auch ein paar Tipps, die haben aber alle nicht funktioniert.
Also dem Verkäufer geschrieben und wegen eines technischen Problems auf meiner Seite erst eine Woche später eine Antwort erhalten. Ich habe das Board dann zurückgeschickt und prompt zwei(!) neue erhalten.
Dachte ich mir: Jetzt kann ich endlich fliegen.
Also habe ich die aktuelle Firmware mit QgroundControl geflasht, hat auch alles funktioniert (Update usw.). Ich habe dann versucht meine ESC zu kalibrieren. Ging nicht, dafür scheine ich das Power Module zu brauchen.
Also zurück auf die alte Firmware mit Mission Planner funktionierte es soweit. Aber dann konnte ich keine Mavlink Verbindung aufbauen. Mit QgroundControl vorher dagegen schon. Zum Glück habe ich ja noch einen zweiten Pixhawk lite. Ich habe dann einfach den genommen mit dem funktioniert es.
Nachtrag 23.9.15: Heute haben dann die Zicken mit der Mavlink Verbindung wieder angefangen. Allerdings kann ich sie meistens lösen, indem ich im Mission Planner eine geringere Baud Rate einstelle als im Pixhawk eingestellt ist. Ich habe keine Ahnung wieso das etwas hilft, aber es funktioniert meistens.
Ab da waren es nur noch Kleinigkeiten, die Probleme bereitet haben, wie zum Beispiel die Drehrichtung der Motoren….
Jetzt funktioniert aber alles einwandfrei selbst das billig GPS hat sehr gute Hdop Werte, so um die 1.5.
Abflugsfertig wiegt der Kopter 1,1 kg.
Mit der Kamera 1,3 kg.
Update 9.12.15:
Nach dem Umbau wiegt der Kopter nun ohne Kamera 1,3 kg und mit 1,5 kg.
Ich bin auch schon zweimal mit Kamera geflogen, einer Sony HDR ASV 100 und ich habe fast kein Jello.
In dem ersten Video teste ich mehr so ein paar Funktionen wie RTL, das Failsafe und so weiter. An der Stelle wo die Motoren kurz ausgehen habe ich meine Fernsteuerung zur Failsafe Überprüfung ausgemacht. Natürlich habe ich das Failsafe vorher ohne Rotoren zuhause getestet.
In dem zweiten teste ich am Anfang ein bisschen und nicht wirklich ausführlich wie sich die neuen PIDs, die ich per Autotune ermittelt habe, machen. Danach noch ein bisschen Aufnahmen von meinem Ort.
Flugzeit waren so 15 Minuten.
Die Videos werden in den kommenden Tagen online gestellt und verlinkt.
Ein paar Bilder werden noch nachgereicht.
Pläne für die Zukunft:
-LEDs zur besseren Lageerkennung
-Einen externen Kompass für die Fc, da ich heute den Prearm Check für den Kompass deaktivieren musste, wegen zu hoher Offsets.
-Eventuell ein Neo M8n-GPS für eine höhere Loiter Genauigkeit.
Da das mein erster Baubericht ist gebt mir bitte eine Rückmeldung.
Bei Fragen oder Verbesserungsvorschlägen gerne schreiben.
Edit: Was mache ich falsch beim Bilder hochladen? Wieso werden manche gedreht?
jetzt kommt auch mein Quadrocopter Baubericht. Die ersten Pläne hatte ich im Jahre 2012. Da habe ich mir dann aber auf den Rat aus einem Forum einen Blade mQx gekauft um erstmal in die Materie reinzukommen. Mit diesem bin ich dann auch bis jetzt geflogen, aber jetzt wurde sein Zustand immer schlechter. Verbindung mit der Fernbedienung etc.
Das war der Auslöser eines neuerlichen Wunsches nach einem Selbstbau.
Und dann habe ich begonnen zu recherchieren und diese Komponenten kamen dabei raus:
Quadrocopter:
Motoren: T-Motor AIR2213 920 kv
Regler: T-Motor AIR20A
Propeller: T-Motor T9545
Alles aus dem T-Motor AIR GEAR 350 Set
FC: Pixhawk Lite von Ebay
GPS: Crius NEO-6m V3.1
Akku: Multistar High Capacity 4S 4000mAh
Rahmen: Eigenbau Alu Rahmen
Das war es auch schon von Komponentenseite.
Ich habe eventuell einen Fehler bei der Akkuauslegung gemacht. Denn ich habe für die Berechnung dummerweise nur den Strom von einem Motor genommen und darauf den Lipo abgestimmt.
Allerdings wird nur bei Vollgas, laut T-Motor Daten, der Dauerstrom des Lipos überschritten. Sollte also, denke ich, für nicht allzu sportlichen Flug funktionieren.
So jetzt geht es aber los mit dem Baubericht:
Ich habe mir zwei Meter Alu Vierkantrohr bestellt, da die örtlichen Baumärkte nichts passendes hatten. Dazu habe ich mir 4mm Multiplex Holz gekauft. Dieses wird für die Centerplatten verwendet.
Zuerst habe ich das Alu auf die nötige Länge gekürzt. Es sollte ursprünglich ein 450er Quadrocopter werden, da ich aber beim Sägen geistig abwesend war und 250mm statt 225mm lange Arme herausgeschnitten habe, wird
es jetzt ein 500er.
Das Ergebnis:
Dann habe ich das Multiplex Holz auf die richtige Größe gesägt.
Als das gemacht war, habe ich die Löcher für die Armbefestigung angezeichnet. Das habe ich so gemacht, dass ich zuerst die Ecken verbunden habe und danach mit einem Zirkel von der Mitte aus die Löcher angezeichnet habe.
Die entstandenen Punkte habe ich gekörnt, damit die Löcher genauer werden.
Verwendet habe ich 8 Löcher mit jeweils 4mm Durchmesser für eine M4 Schraube und eine Stoppmutter auf der anderen Seite.
Zum Bohren habe ich die beiden Platten mit einer Zwinge zusammen gehalten, damit die Löcher an der gleichen Stelle sind. Dabei nicht vergessen sich zu markieren welche Seiten des Holzes beim Bohren übereinander lagen.
Für die Befestigungslöcher in den Alu-Armen habe ich zunächst die mittleren Löcher ausgemessen und gebohrt. Die Alu-Arme wurden durch diese Löcher in der Mitte fixiert, weswegen ich die äußeren Löcher nicht ausmessen musste, sondern mit einem Winkel für Rechtwinkligkeit sorgen und dann mit dem 4mm Bohrer „anbohren“ konnte. Das Durchbohren habe ich mit der Standbohrmaschine gemacht.
Damit war das Grundgerüst des Rahmens fertig.
Wenn man genau arbeitet hat man zwei exakt gleiche Platten. Bei mir waren sie auf unter einem mm genau. Das ist allerdings nicht sooo wichtig, soweit die Löcher an den selben Positionen sind.
Update 9.12.15:
Ich habe die obere Centerplatte vergrößert, sodass das GPS jetzt ganz vorne sitzt und hoffentlich etwas weniger Störungen abbekommt. Dazu kann ich durch die verlängerte Centerplatte die Kamera so montieren, dass ich keine Propeller im Bild habe. Sie ist jetzt von unten an die Centerplatte geschraubt.
Anhang anzeigen 143240
Anhang anzeigen 143239
Da ich mir kein Stromverteilungsboard gekauft habe, musste ich mir eines selber bauen.
Dazu habe ich eine Lochraster Platine genommen und aus ihr zwei Stücke herausgebrochen, die in den Zwischenraum zwischen meinen beiden Centerplatten passen.
Als nächstes habe ich mir aufgezeichnet wie ich den Kupferdraht, der den Strom leitet, verlegen will.
An den Enden habe ich zwei Kabel angelötet.
Dieses habe ich doppelt ausgeführt und habe beide miteinander verbunden. Auf Polarität achten!!!
Die beiden rechten Kabel führen zum Akku hin.
So sieht dann das Stromverteilungsboard verbaut aus. Die Kabel die unten aus dem Bild gehen, gehen zum zweiten Board mit Batterieanschluss. Links oben habe ich testweise schon mal einen Regler angelötet.
Update 9.12.15:
Auf dem Bild sieht mein selbstgebautes APM Power Module, das den Strom und die Spannung misst und 5V für den Pixhawk zur Verfügung stellt. Dieses wurde direkt unter den Akku verbaut und mithilfe eines Flachbandkabels mit dem Pixhawk verbunden.
Anhang anzeigen 143235
So ist die Verschaltung. Ich kann die genaue Funktionsweise genauer erklären, wenn erwünscht.
Anhang anzeigen 143255
Das war der Testaufbau
Anhang anzeigen 143236
Anhang anzeigen 143234
Anhang anzeigen 143233
Jetzt fehlten mir noch die Motorhalter, ein Akkuhalter und ein Landegestell.
Aber die Motorhalter zuerst.
Ich habe mir ein Design überlegt und dieses in Visio gezeichnet, ausgedruckt und dann auf ein Stück Holz übertragen.
Wieder mit dem Körner die Ecken gekennzeichnet und dann gefräst.
Die Löcher noch gebohrt und eventuell erweitert falls es nicht gepasst hat.
Das Ergebnis:
Dies Motorhalter mussten ja noch am Rahmen befestigt werden. Deswegen habe ich in die Aluminium Arme und in die Motorhalter 2,5mm Löcher gebohrt, um dann in das Holz ein M3 Gewinde zu schneiden. Die Löcher in den Aluminium Armen habe ich dann noch aufgebohrt auf 3mm, damit meine Schrauben durchpassen.
Zum Gewindeschneiden habe ich leider keine Bilder.
Nachtrag 28.9.15 zu den Motorhaltern:
Es hat sich herausgestellt, das das Holz nicht gescheit hält, deswegen habe ich aus 7075er Aluminium neue gebaut:
Zuerst habe ich mir wieder die grobe Menge Alu abgeschnitten(Meine Fräse ist zu klein
).
Dann gefräst
Danach noch die diversen Löcher gebohrt und solange nachbearbeitet, bis der Sicherungsring nicht mehr geschliffen hat.
Das Ergebnis:
Montiert sieht das Ganze dann so aus:
Ich habe gestern Abend auch noch einen kurzen Testflug gemacht. Fliegt sich minimal agiler habe ich das Gefühl.
Die Reglerbefestigung: Diese Regler lassen sich leider nur sehr schlecht mit Kabelbindern so montieren, dass ihre Kühlfläche frei ist. Andersherum hängt die Kühlfläche leider wenige Millimeter in der Luft. Deswegen habe ich aus Aluminium kleine Wärmeleitpads gefräst. Diese sollen dazu dienen die Abwärme der Regler an die Alu Arme weiterzugeben. Zwischen Alu und Alu habe ich noch etwas Wärmeleitpaste geschmiert.
Der Rahmen mit Motoren wiegt 650 Gramm.
Danach gibt es leider kein Bildmaterial während des Baus sondern nur fertige Aufnahmen, da meine Kamera ausgefallen ist.
Zur Akkuhalterung wurde eine ehemalige Schraubenkiste zweckentfremdet und der Deckel mithilfe der Schrauben, die meine Centerplatten zusammenhalten am Quadrocopter montiert. Den Rest der Box habe ich mithilfe von zwei Kabelbindern, die unter dem Deckel verlegt sind, befestigt. Somit ist der Akku schon mal in drei Richtungen gesichert. Zur Sicherung der vierten Richtung nutze ich einen Gummi der an zwei kleinen Schrauben eingehakt wird.
Zusätzlich habe ich noch LEDs verbaut, um die Sichtbarkeit des Kopters zu verbessern. Vorher war es schon nach wenigen Metern Entfernung für mich quasi unmöglich zu erkennen wie der Kopter steht. Es sind diehier: eBay inspiriert aus diesem Thread: Fpv-Community
Anhang anzeigen 143251
Anhang anzeigen 143237
Am Ende habe ich mir noch versucht mit meiner Tiefziehbox eine Haube für den Kopter zu bauen, um die Elektronik besser vor Wasser zu schützen. Erstmal musste ein Negativ her. Ich habe mir einfach was aus Legos gebaut.
Anhang anzeigen 143238
Und dann tiefgezogen. Leider habe ich sehr viele Falten in dem Lexan.
Anhang anzeigen 143254
Anhang anzeigen 143253
Das Landegestell war das letzte was noch fehlte. Man sieht ihm an das ich fliegen wollte und mich nicht noch lange damit rumschlagen wollte. Deswegen habe ich einfach von einem Elektroverlegerohr(nennt man das so?) Scheiben abgeschnitten. Da diese jedoch nicht genügend Abstand zwischen Copter und Boden brachten, habe ich einfach nochmal eine Scheibe abgeschnitten und die beiden mithilfe einer kleinen Schraube zusammengeschraubt.
Update 9.12.15:
Ich habe mein Landegestell überarbeitet und etwas aufwendigeres mit Stoßdämpfern gemacht. Inspiriert wurde ich von einem Bild im Internet. Es funktioniert einigermaßen gut. Die Stäbe sind aus einem alten CD-Regal, und leider nicht die leichtesten. Die Löcher in die Rohre habe ich mithilfe meiner Fräse "gebohrt", um nicht seitlich wegzurutschen.
Anhang anzeigen 143232
So sieht das Ganze dann am Copter montiert aus.
Anhang anzeigen 143241
Entschuldigung wegen der schlechten Bild Qualität.
Die Komponenten wurden mithilfe von doppelseitigem Klebeband bzw. Heißkleber auf die Holzplatte geklebt. Unter die FC habe ich noch etwas Schaumstoff angebracht zur Vibrationsdämpfung.
Dann ging es ans Einstellen der FC. Ich sag euch eine Odyssee. Denn auf meinem PC läuft nur der alte Mission Planner. Der Rest stürzt ab. Auf der Pixhawk Seite stand ich solle aber QgroundControl verwenden.
Also PC von meinem Vater geschnappt, installiert, ging wunderbar. Die Anleitung habe ich brav befolgt und wollte ein Firmware Update machen bricht ab mit der Meldung: “Erase Befehl nicht erkannt. Update complete.“ War's aber leider nicht.
Das Board hat sich nicht mehr gemeldet am PC.
Also gegoogelt. Herausgefunden das der Bootloader hinüber ist. Es gab auch ein paar Tipps, die haben aber alle nicht funktioniert.
Also dem Verkäufer geschrieben und wegen eines technischen Problems auf meiner Seite erst eine Woche später eine Antwort erhalten. Ich habe das Board dann zurückgeschickt und prompt zwei(!) neue erhalten.
Dachte ich mir: Jetzt kann ich endlich fliegen.
Also habe ich die aktuelle Firmware mit QgroundControl geflasht, hat auch alles funktioniert (Update usw.). Ich habe dann versucht meine ESC zu kalibrieren. Ging nicht, dafür scheine ich das Power Module zu brauchen.
Also zurück auf die alte Firmware mit Mission Planner funktionierte es soweit. Aber dann konnte ich keine Mavlink Verbindung aufbauen. Mit QgroundControl vorher dagegen schon. Zum Glück habe ich ja noch einen zweiten Pixhawk lite. Ich habe dann einfach den genommen mit dem funktioniert es.
Nachtrag 23.9.15: Heute haben dann die Zicken mit der Mavlink Verbindung wieder angefangen. Allerdings kann ich sie meistens lösen, indem ich im Mission Planner eine geringere Baud Rate einstelle als im Pixhawk eingestellt ist. Ich habe keine Ahnung wieso das etwas hilft, aber es funktioniert meistens.
Ab da waren es nur noch Kleinigkeiten, die Probleme bereitet haben, wie zum Beispiel die Drehrichtung der Motoren….
Jetzt funktioniert aber alles einwandfrei selbst das billig GPS hat sehr gute Hdop Werte, so um die 1.5.
Abflugsfertig wiegt der Kopter 1,1 kg.
Mit der Kamera 1,3 kg.
Update 9.12.15:
Nach dem Umbau wiegt der Kopter nun ohne Kamera 1,3 kg und mit 1,5 kg.
Ich bin auch schon zweimal mit Kamera geflogen, einer Sony HDR ASV 100 und ich habe fast kein Jello.
In dem ersten Video teste ich mehr so ein paar Funktionen wie RTL, das Failsafe und so weiter. An der Stelle wo die Motoren kurz ausgehen habe ich meine Fernsteuerung zur Failsafe Überprüfung ausgemacht. Natürlich habe ich das Failsafe vorher ohne Rotoren zuhause getestet.
In dem zweiten teste ich am Anfang ein bisschen und nicht wirklich ausführlich wie sich die neuen PIDs, die ich per Autotune ermittelt habe, machen. Danach noch ein bisschen Aufnahmen von meinem Ort.
Flugzeit waren so 15 Minuten.
Die Videos werden in den kommenden Tagen online gestellt und verlinkt.
Ein paar Bilder werden noch nachgereicht.
Pläne für die Zukunft:
-LEDs zur besseren Lageerkennung
-Einen externen Kompass für die Fc, da ich heute den Prearm Check für den Kompass deaktivieren musste, wegen zu hoher Offsets.
-Eventuell ein Neo M8n-GPS für eine höhere Loiter Genauigkeit.
Da das mein erster Baubericht ist gebt mir bitte eine Rückmeldung.
Bei Fragen oder Verbesserungsvorschlägen gerne schreiben.
Edit: Was mache ich falsch beim Bilder hochladen? Wieso werden manche gedreht?
Zuletzt bearbeitet: